

 联系我们
联系我们

外连接外部操作设备等的急停开关时使用。输入信号,关闭伺服电源,停止程序执行。信号输入时,无法接通伺服电源。由于安川机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
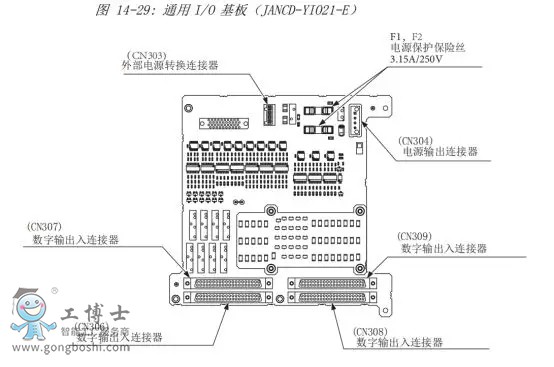
安川机器人通用 I/O 基板(JANCD-YIO21-E)
1、通用IO基板插头外接
(1)电箱背板插头
(图片来源于网络 侵删)

(图片来源于网络 侵删)
(图片来源于网络 侵删)
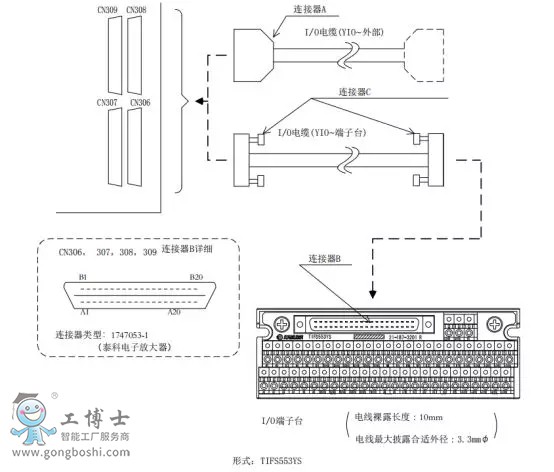
(4)连接器端子头

(图片来源于网络 侵删)

(图片来源于网络 侵删)

(图片来源于网络 侵删)
(1)接线板端子

(图片来源于网络 侵删)
(图片来源于网络 侵删)
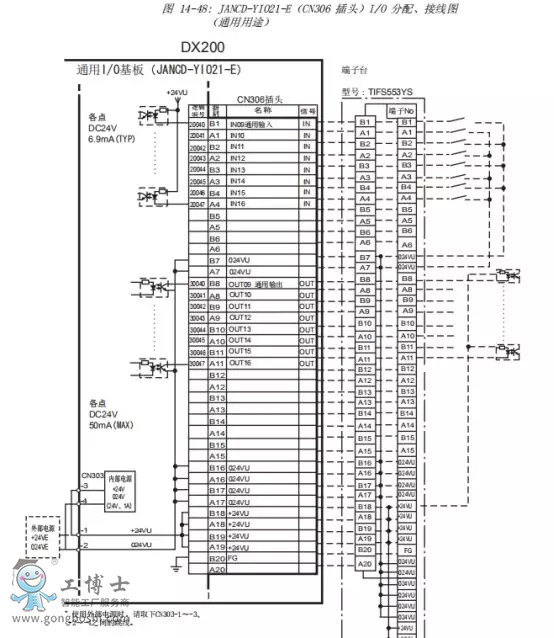
(1)CN306接线端子图

(图片来源于网络 侵删)
4、通用IO基板CN307
5、通用IO基板CN308
(1)CN308接线端子图
(2)CN308实物图
三、安川外部启动常用的信号及其接线图
1、安全端子台基板常用IO接线图
(1)外部急停接线图
外连接外部操作设备等的急停开关时使用。输入信号,关闭伺服电源,停止程序执行。信号输入时,无法接通伺服电源。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
(2)暂停接线图
连接外部操作设备等的暂停开关时使用。输入信号,停止程序。信号输入时将无法开始作业和进行轴操作。由于机器人出厂时配有跳线,使用时必须先取下跳线。不取下跳线,即使输入了外部急停信号也不会起作用,会造成人身伤害或设备损坏。
(3)外部上电接线图
连接外部操作设备等的伺服开启开关时使用。输入信号,开启伺服电源。