

 联系我们
联系我们

你对工业机器人有着什么样的了解?关于工业机器人,我们过去也反反复复推送了很多的文章,在这一次,我们将尝试解决有关---在工业环境中使用的常见的机器人和作业时经常会遇到的问题。工业机器人手臂,控制柜,控制面板,示教器以及其他外围设备组成。

上图为 MOTOMAN 六关节型机器人,它由腰关节 S、大臂关节 L、小臂关节 U 和腕关节 R, B,T 组成。因而机器人末端执行器的空间位置可以表示为 P(S,L,U,R,B,T),其中 S,L,U,R,B,T为该位置机器人各关节相对于关节零点的坐标。另外,直角坐标系下,位置 P 还可以表示为 P (X,Y,Z,TX,TY,TZ),其中 X,Y,Z 表示 P 点的位置,TX,TY,TZ 表示 P 点的位姿。
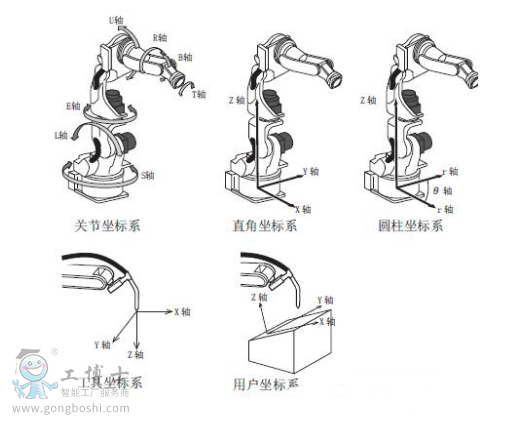
MOTOMAN 内部坐标系有关节坐标系(Joint coordination)、机器人坐标系(Robot coordination)、基坐标系(Base coordination)和用户坐标系(User coordination)四种,后三种都是直角坐标系。在示教过程中保存的点都是用关节坐标表示的。用户可以在机器人内部建立自己的用户坐标系,在示教之后,利用内部指令把示教文件(Specified job)转换成用户坐标系下的相对文件(Related job),这样就可以得到示教点在用户坐标系下的坐标了。如此以来,在用户坐标系下,就很方便做一些处理。
结语
希望大家在日常的机器人编程或者机器人保养调试中,养成良好的习惯,规范化编程,在日后的编程过程中必定事倍功半,而且积累收获颇丰。
在新年来临之际,祝各位搞机朋友新春快乐,新的一年工作顺顺利利,好运常相伴,家庭和和睦睦,身体健健康康!另外,万事安全!
- 下一篇:设计安川喷漆设备应该考虑经济效益性
- 上一篇:安川机器人外部轴配件